こんにちは松本拓巳です。
MAC-40Vの修理をしていく中で解った事を発信します。
修理が長引いたのはオリエンテーション位置決めが上手く行かず
ホルダーATCのU溝とオリエンテーションブロックが嚙み合わない為でした。
今回はMAC-40Vのオリエンテーション位置決めを正確に
行うパラメータがありました。
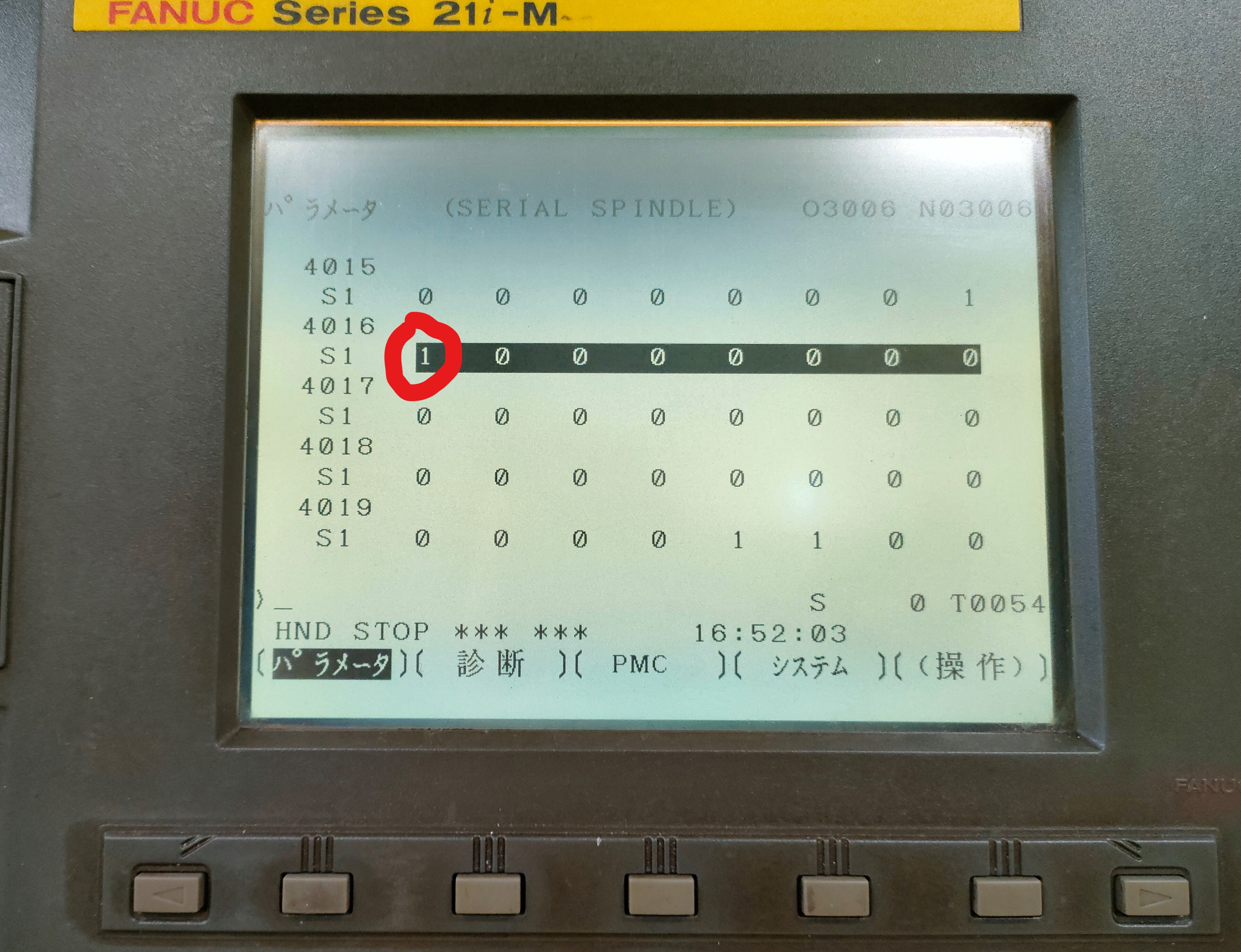
パラメータ4016の7ビット目を1にすると正確なオリエンテーションが出来るようです。
オリエンテーションについてネットの情報が有りました↓
(MAC-40Vはエンコーダが無いタイプでした。)
Q;主軸のオリエンテーション位置決めはどのような仕組み で正確な位置に止まることができるのですか?
A;主軸には主軸用のエンコーダが有って位置決めしています。
または、主軸に取り付けた割出板の切り欠きの位置をセンサー等で検知するというものです. この場合、主軸をゆっくり回転させ、その切り欠きの位置で停止させる訳ですが、 停止と同時にエアシリンダ等で物理的にピンなどを入れる事もあるかも知れません. 主軸が角度割り出しできる仕様であれば、サーボ制御した上でロータリーエンコーダ等の信号を利用する事もあると思います.
オリエンテーションは各機械によって位置決め方法が違うようなので
詳しく知りたい方はメーカに確認して下さい。
以上で終わります。
No responses yet